
' 이탈리아 연구진이 iRonCub3의 첫 비행을 성공적으로 완료했습니다.
로봇은 지면에서 약 50cm 높이로 떠올라 비행 내내 안정적으로 유지되었습니다. 이 성과를 자세히 설명한 연구 논문이 오늘 Nature Communications Engineering에 게재되었습니다.
Real-Life Iron Man: World’s First Jet-Powered Humanoid Robot Takes Fligh
https://scitechdaily.com/real-life-iron-man-worlds-first-jet-powered-humanoid-robot-takes-flight
이탈리아 공과대학(IIT)은 세계 최초의 제트 추진 비행 휴머노이드 로봇인 iRonCub3의 첫 비행에 성공함으로써 휴머노이드 로봇 분야에서 중요한 돌파구를 마련했습니다. iRonCub3는 실제 환경에 맞춰 제작된 세계 최초의 제트 추진 비행 휴머노이드 로봇입니다. 연구팀은 로봇의 복잡한 공기역학을 분석하고 상호 연결된 부분을 관리하는 첨단 제어 시스템을 개발했습니다.
실제 비행 테스트를 포함한 전체 개발 과정은 약 2년이 소요되었습니다. 최근 실험에서 로봇은 안정성을 유지하면서 지면에서 약 50cm 높이까지 상승했습니다. 이러한 성공은 인간과 유사한 형태를 유지하면서도 까다로운 환경에서도 작동할 수 있는 비행 로봇 개발에 있어 한 걸음 더 나아간 것입니다.
공기역학 및 제어 연구의 세부 사항은 Nature Portfolio의 오픈 액세스 저널인 Nature Communications Engineering 에 게재되었습니다 . 이 연구는 이탈리아 제노바에 있는 IIT 로봇공학자들이 밀라노 공과대학 DAER 공기역학 연구소의 Alex Zanotti 팀과 협력하여 수행했습니다. 이 연구소에서는 광범위한 풍동 실험이 수행되었으며, 스탠퍼드 대학교의 Gianluca Iaccarino 팀에서는 공기역학 모델링을 위한 딥러닝 알고리즘을 개발했습니다.
이 비행 시연은 다니엘레 푸치가 이끄는 IIT 인공지능 및 기계 지능(AMI) 연구실의 최신 이정표입니다. 이들의 연구는 보행 및 비행 기능을 통합하여 다중 모드 휴머노이드 로봇의 역량을 확장하고, 로봇이 비정형적이고 극한 환경을 탐색할 수 있도록 하는 것을 목표로 합니다.
디자인 및 하드웨어 혁신
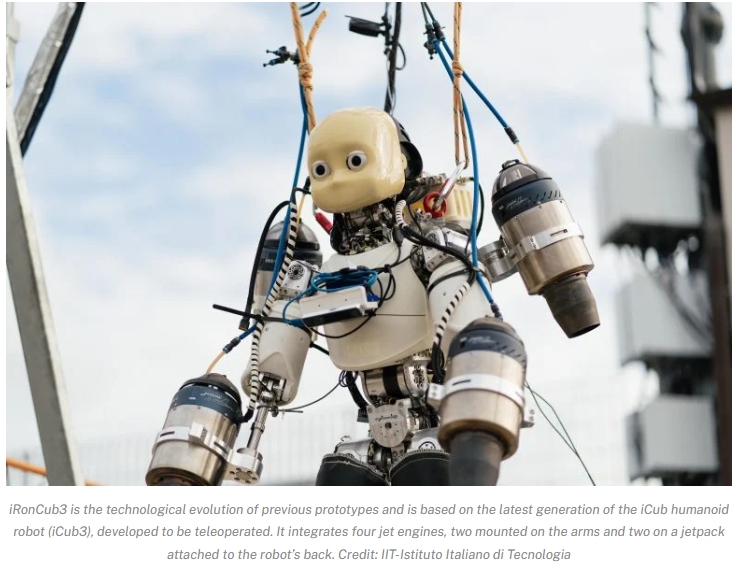
iRonCub3는 이전 프로토타입 개발의 다음 단계를 나타내며, 원격 조작을 위해 설계된 iCub 휴머노이드 로봇 iCub3의 최신 버전을 기반으로 제작되었습니다. 이 로봇은 네 개의 제트 엔진을 갖추고 있는데, 두 개는 팔에, 나머지 두 개는 등에 부착된 제트팩에 장착되어 있습니다. 이러한 엔진을 지원하기 위해 iCub 하드웨어는 새로운 티타늄 척추와 내열 보호 커버로 수정되었습니다.
제트 엔진을 장착한 로봇의 무게는 약 70kg입니다. 터빈은 최대 1000뉴턴 이상의 추력을 생성할 수 있습니다. 이러한 설정 덕분에 로봇은 바람의 영향이나 불확실한 환경 조건에서도 호버링하고 제어된 비행 기동을 수행할 수 있습니다. 엔진의 배기 온도는 최대 섭씨 800도에 달할 수 있습니다 .
이탈리아 공과대학(IIT) 연구진이 iRonCub3의 첫 비행에 성공했습니다. 이 로봇은 안정성을 유지하면서 바닥에서 약 50cm 높이까지 들어 올릴 수 있었습니다. 이러한 결과는 열역학 및 공기역학 연구와 로봇 공학, AI 기반 제어 시스템의 결합 덕분에 가능했습니다. 출처: IIT-Istituto Italiano di Tecnologia
다니엘레 푸치는 "이 연구는 기존 휴머노이드 로봇 기술과는 근본적으로 다르며, 최첨단 기술에 비해 상당한 도약을 이루어야 했습니다."라고 설명합니다. "여기서 열역학은 핵심적인 역할을 합니다. 터빈에서 배출되는 가스는 700°C의 온도에 도달하고 거의 음속에 가까운 속도로 흐릅니다. 공기역학은 실시간으로 평가되어야 하며, 제어 시스템은 저속 관절 액추에이터와 고속 제트 터빈을 모두 처리해야 합니다. 이러한 로봇을 테스트하는 것은 매우 흥미롭지만 위험하기도 하며, 즉흥적인 판단은 용납될 수 없습니다."

AMI 연구팀은 로봇의 동적 균형에 집중했는데, 특히 인간형 외형으로 인해 이 균형은 매우 까다롭습니다. 컴팩트하고 대칭적인 구조를 가진 기존 드론과 달리, iRonCub3는 길쭉한 형태에 무게가 움직이는 팔다리에 분산되고 질량 중심이 이동합니다. 이러한 복잡성 때문에 로봇의 다물체 동역학과 제트 추진과 팔다리 움직임 사이의 상호작용을 고려한 고급 비행 균형 모델 개발이 필요했습니다. 또한, 움직이는 팔다리는 각 움직임이 몸 주위의 공기 흐름을 변화시키기 때문에 로봇의 공기역학을 매우 복잡하게 만듭니다.
AI 및 공기역학 모델링
IIT의 연구자들은 광범위한 풍동 실험과 고급 전산 유체 역학(CFD) 시뮬레이션을 수행했으며, 실시간으로 공기역학적 힘을 추정할 수 있는 AI 기반 모델을 개발했습니다.
"저희 모델에는 시뮬레이션 및 실험 데이터로 훈련된 신경망이 포함되어 있으며 로봇의 제어 아키텍처에 통합되어 안정적인 비행을 보장합니다."라고 IIT와 나폴리 대학의 공동 프로그램에서 박사 과정을 밟고 있는 논문의 주저자이자 박사 과정 학생인 안토넬로 파올리노가 설명했습니다. 그는 스탠포드 대학에서 한 학기를 방문 연구원으로 보냈습니다.




